4 形态学
基本想法
用具有一定形态的结构元素去度量和提取图像中的对应形状,为了识别和分析
4.1 集合论
补集:记为\(A^c=\{w|w\notin A\}\)
差集:\(A-B=A\cap B^c = \{w|w\in A \and w\notin B\}\)
平移:将集合B的原点平移到\(z=(z_1, z_2)\),则集合B重新记为\((B)_z=\{w|w = d+z,d\in B\}\)
反射:集合B按照原点中心对称,\(\hat{B}=\{w|w=-b, b\in B\}\)
4.2 结构元
一个像素集合,没有大小和形状限制,但必须有原点(可以任意位置,filter没有原点)
通常情况下假定结构元是矩阵,数值是逻辑0/1,原点是中心点
在形态学运算中,只关心结构元的前景(1)的逻辑运算
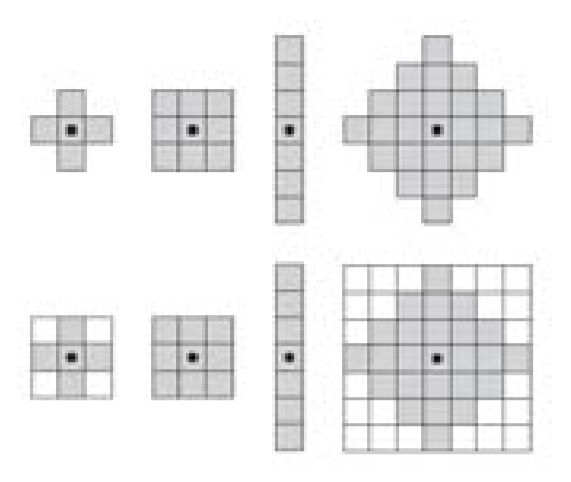
逻辑运算的结果是像素点,使用结构元的原点遍历图像的每一个像素
4.3 在二值图像中的操作
4.3.1 基本操作:适合(Fit)和击中(Hit)
适合:结构元中所有1都和图像区域重合
击中:结构元中存在1和图像区域重合
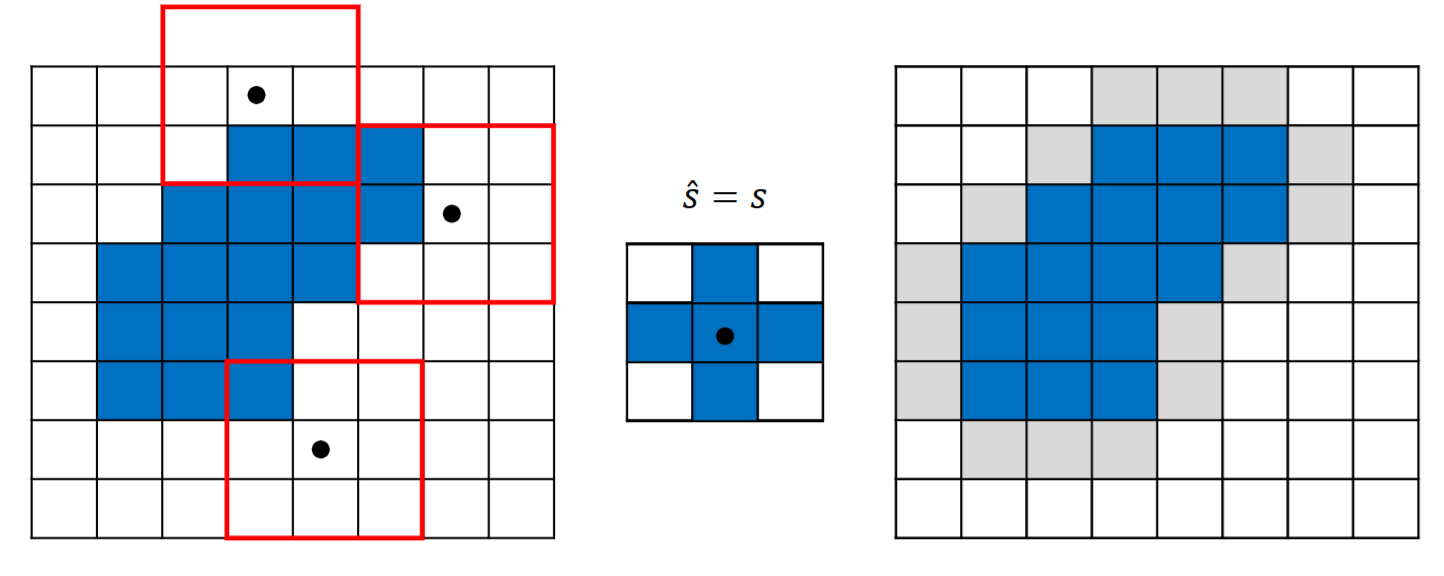
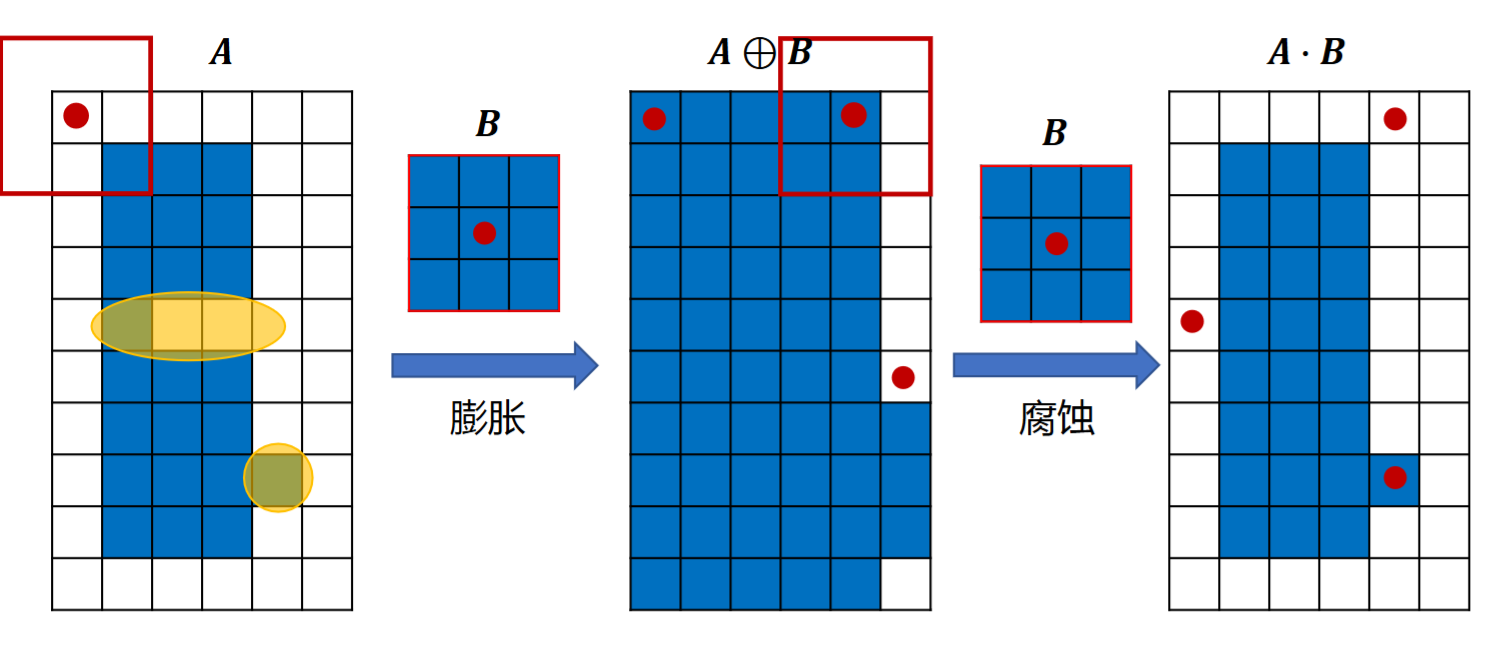
4.3.2 腐蚀
集合A用结构元B来腐蚀,记为\(A\ominus B\),定义为
\[
A \ominus B = \{z|(B)_z\subseteq A\} \Leftrightarrow \{z|(B)_z\cap A^c = \phi\}\\
A(z)=
\begin{cases}
1\,\,\,\, (B)_z \mathsf{Fits} A\\
0\,\,\,\, o.w.
\end{cases}
\]
表示B移动后完全在A中,B的原点位置的集合
腐蚀可以消除边界点,使边界向内部收缩,可以消除小且无意义的物体
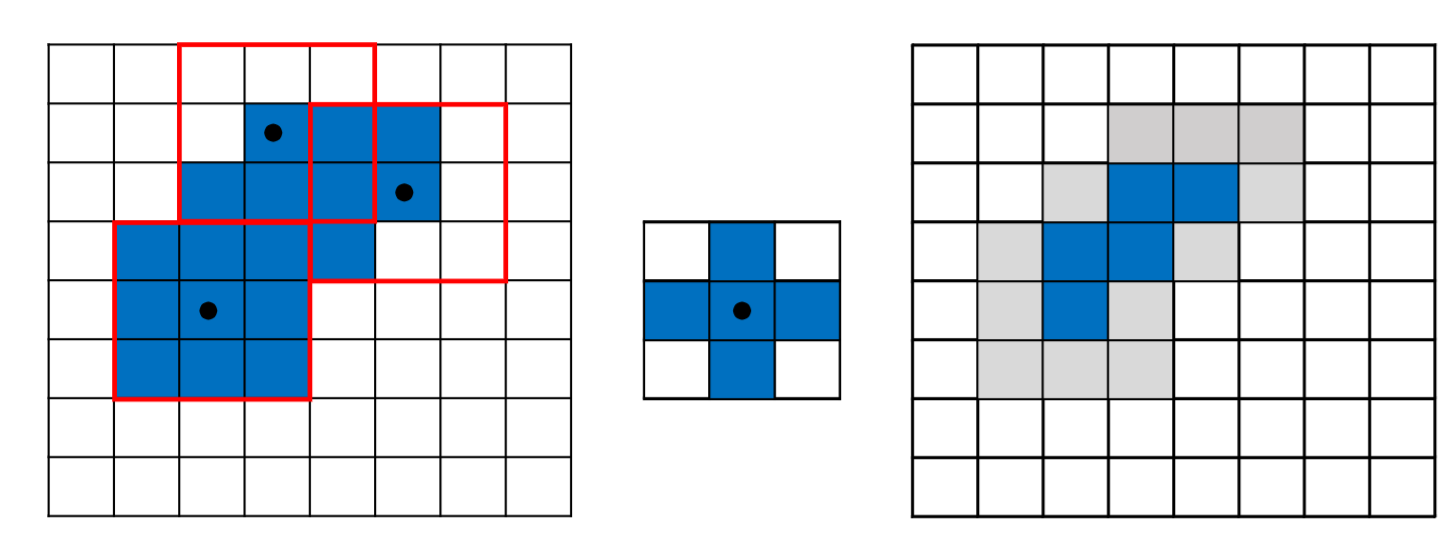
4.3.3 膨胀
集合A用结构元B来膨胀,记为\(A\oplus B\),定义为
\[
A \oplus B = \{z|\hat{(B)_z}\cap A\neq \phi\}\\
A(z)=
\begin{cases}
1\,\,\,\, \hat{(B)_z} \mathsf{Hits} \,\,\,A\\
0\,\,\,\, o.w.
\end{cases}
\]
表示B的反射进行平移且与A存在非空交集,B的原点的位置的集合
膨胀使得边界向外部扩展,增加大小,填补缺口和凹陷
4.3.4 腐蚀与膨胀的对偶性
\[ (A\ominus B)^c = A^c\oplus \hat{B}\\ (A\oplus B)^c = A^c\ominus \hat{B} \]
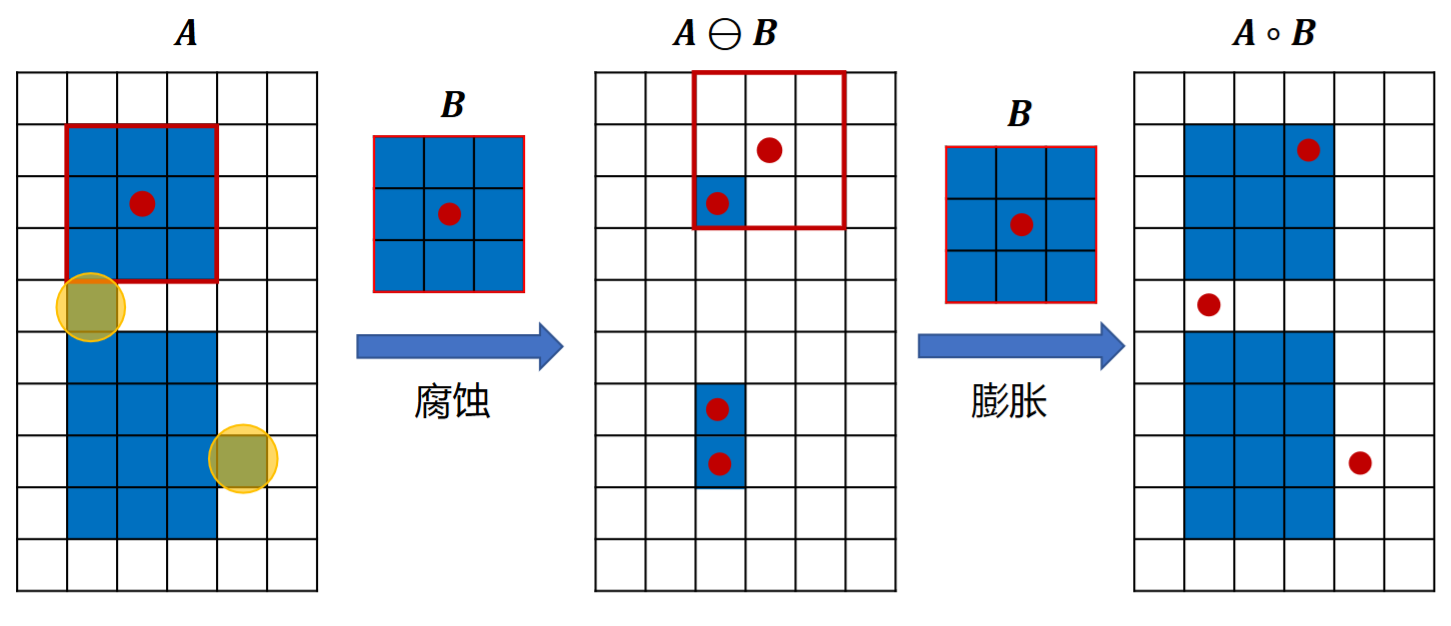
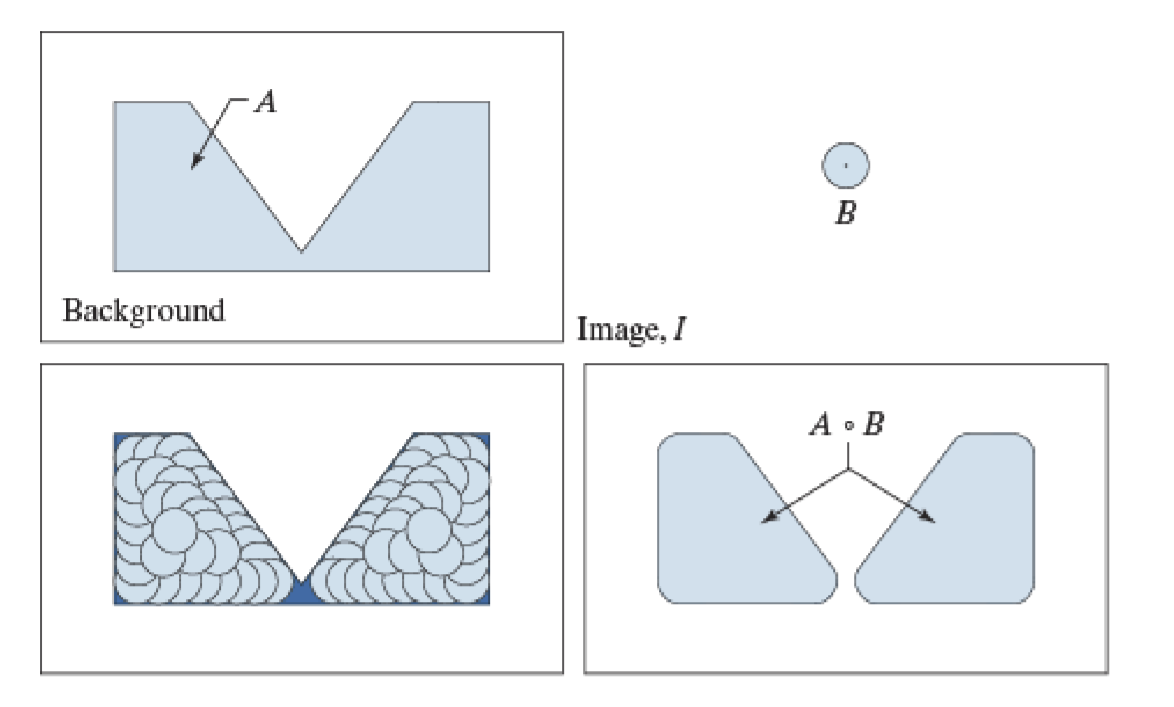
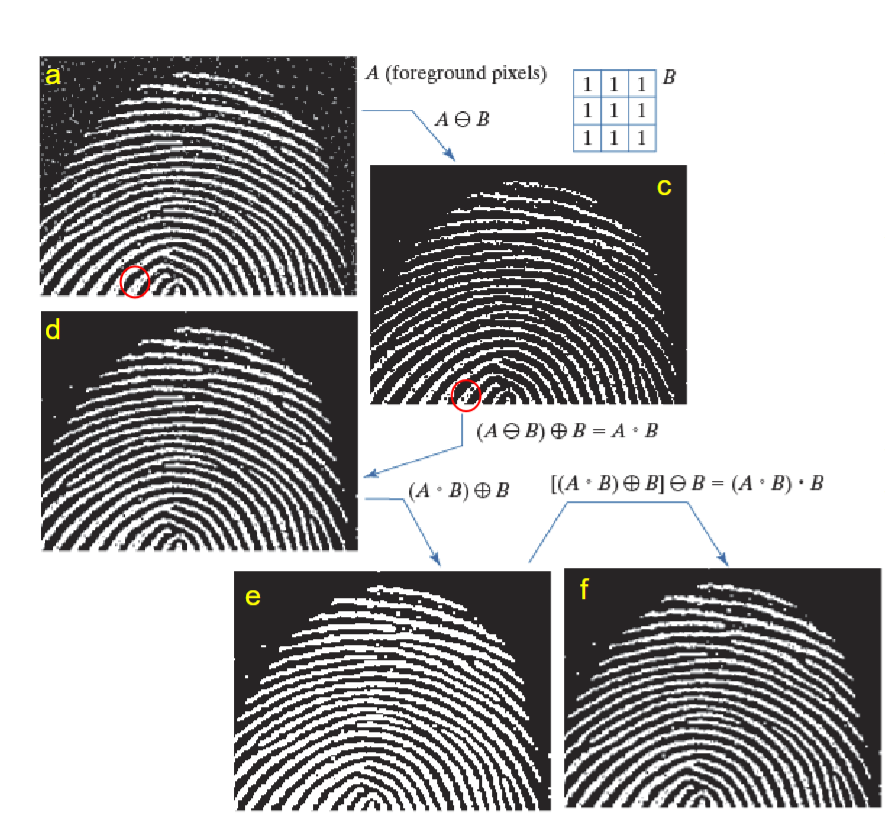
4.3.5 开运算
集合A用结构元B进行开运算,就是先用B腐蚀A,再对结果进行膨胀,记为\(A\circ B\)
\[
A\circ B = (A\ominus B)\oplus B
\]
开运算能后去除孤立的小点,毛刺和小桥
几何解释
B在A边界内部转动,B中的点能达到的A的内部的最远的点,即
\[
A\circ B = \bigcup \{(B)_z|(B)_z\subseteq A\}
\]
所有的平移后的结构元的集合(与原点的集合区分)
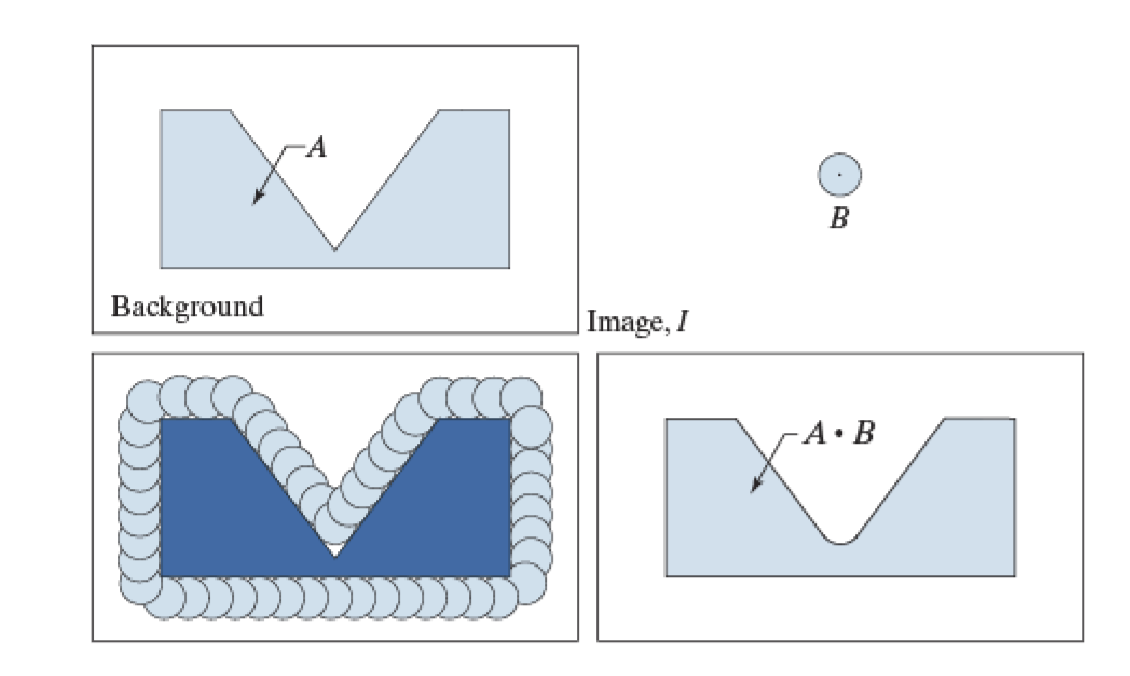
4.3.6 闭运算
结构元B对集合A做闭运算,就是先用B对A膨胀,后用B对结果进行腐蚀,记为\(A\cdot B\)
\[
A \cdot B = (A\oplus B )\ominus B
\]
闭运算可以填补物体内细小空洞,连接临近物体
几何解释
B在A的外边界转动,B中的点能达到的A的边界的最近点
4.3.7 开运算与闭运算
- 先开操作,构成了噪声滤波器,将小的噪声颗粒去除
- 但是内部的一些有效性息也没了,需要闭运算进行修补
对偶性
\[
(A\cdot B)^c = A^c \circ \hat{B}\\
(A\circ B)^c = A^c \cdot \hat{B}
\]
开运算性质
- \(A\circ B \subseteq A\)
- 如果\(C \subseteq D\),那么\(C\circ B \subseteq D\circ B\)
- \((A\circ B )\circ B = A \circ B\)
闭运算性质
- \(A \subseteq A\cdot B\)
- 如果\(C \subseteq D\),那么\(C\cdot B \subseteq D\cdot B\)
- \((A\cdot B )\cdot B = A \cdot B\)
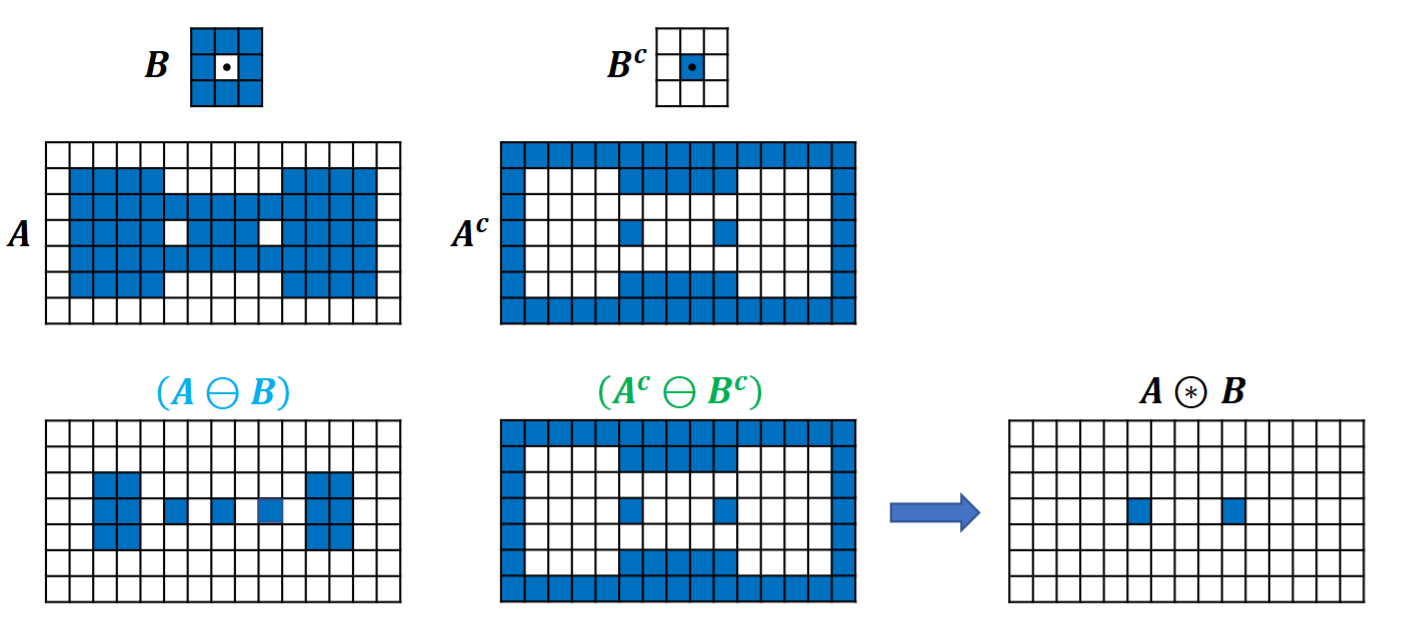
4.3.8 击中-击不中变换
定义两个结构元\(B_1,B_2\),在前景中使用\(B_1\)进行腐蚀,在背景中使用\(B_2\)
\[
A \circledast B_{1,2} = \{z|(B_1)_z\subseteq A \and(B_2)_z\subseteq A^c \} = (A\ominus B_1)\cap(A^c\ominus B_2)
\]
一般选定的\(B_1 = B, B_2=B^c\),此时的返回结果就是A中与B一摸一样的结构的原点
4.3.9 边界提取
边界定义为\(\beta(A)\),使用结构元B腐蚀A,然后求其与A的差集
\[
\beta(A) = A - (A \ominus B)
\]
其中B是8邻接的
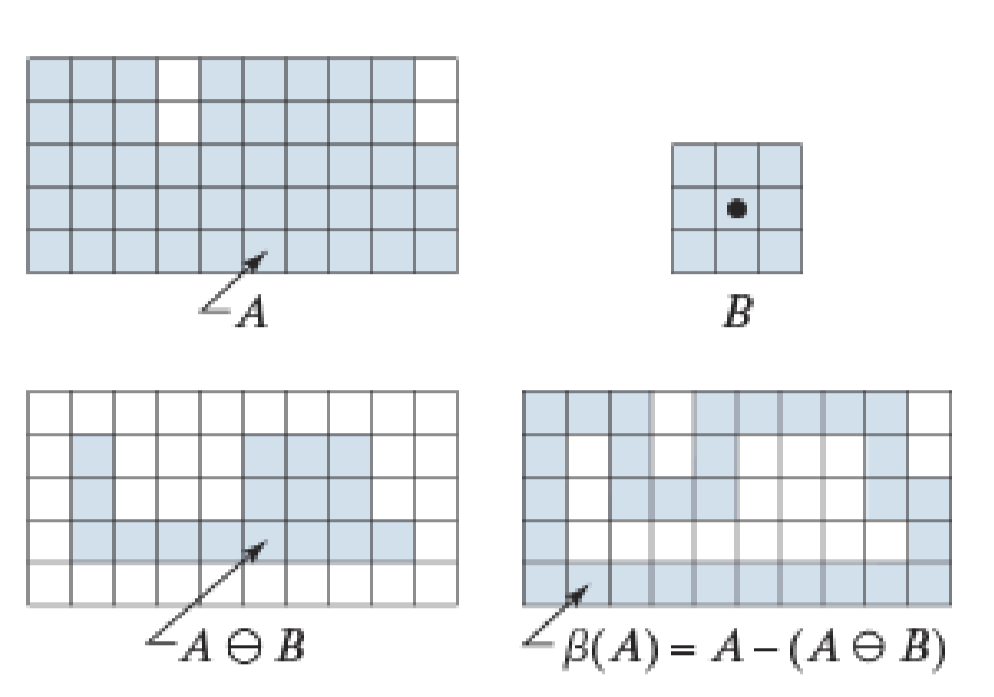
边界提取相对于锐化滤波的好处:后者通常对噪声敏感,边缘不连续不规则
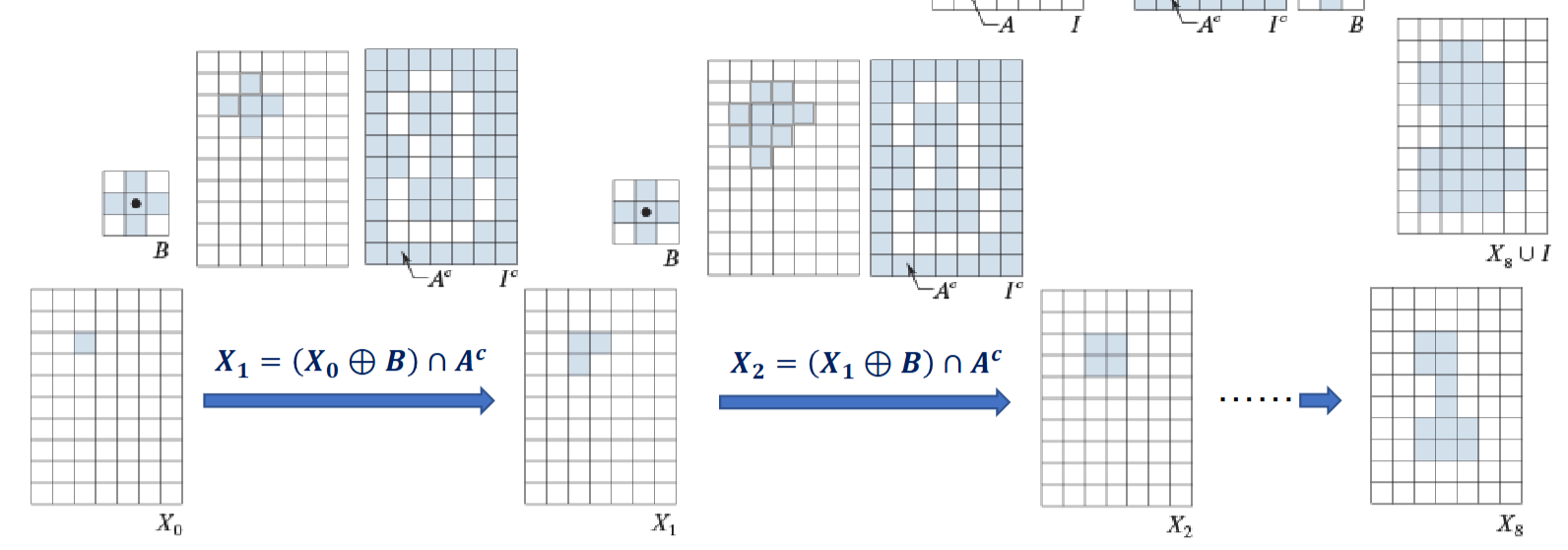
4.3.10 孔洞填充
将闭合边界内部的空洞填满
\[
X_k = (X_{k-1} \oplus B) \cap A^c
\]
当\(X_k = X_{k-1}\)时,停止迭代;A是原图中的一个轮廓,B是4邻接的
需要先给定一个种子点,从种子点膨胀至整个孔洞,最后与原图做并集,得到填充完的图像
为了找出所有的孔洞,可以使用阈值变换
当边缘未闭合时,收敛次数会很大,因为背景也在填充。通过设置收敛次数的阈值,可以用来检测图像是否闭合
如何一次性找出所有的种子点?
利用白顶帽,将本就灰度低的孔洞灰度变得更低,可以认为灰度为0,然后用阈值反变换,将0变为255,得到所有的孔洞种子
但是风险也很明显
4.3.11 连通分量提取
\[ X_k = (X_{k-1} \oplus B) \cap I \]
当\(X_k = X_{k-1}\)时,停止迭代;I是原图,B是8邻接的
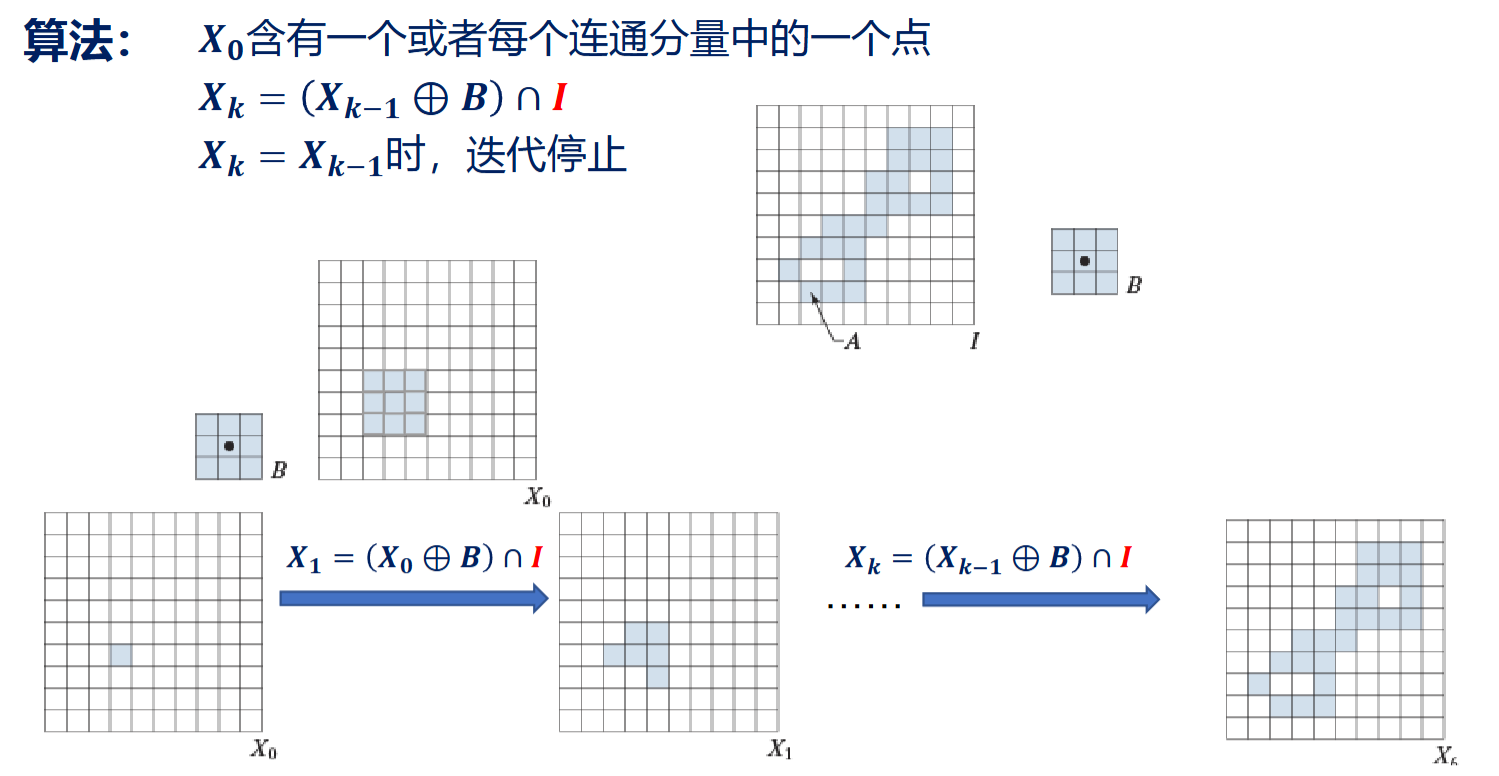
算法和孔洞填充很像,但是B和I不同
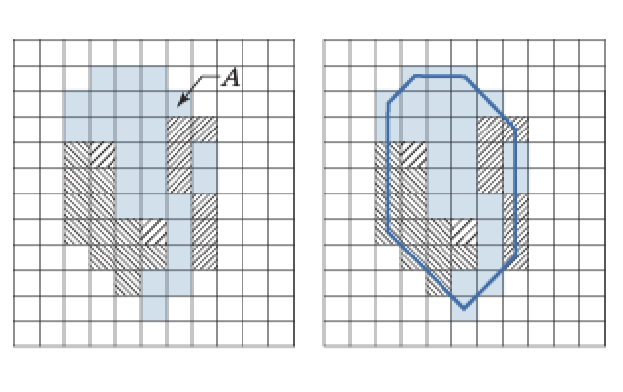
4.3.12 凸壳
一个多边形内任意两点的连线在多边形内,则称这是个凸集
集合\(S\)的最小凸集\(H\)称为S的凸集合,\(H-S\)称为凸缺
图像在采集时可能由于光照等原因发生缺损,凸壳处理可以弥补缺损
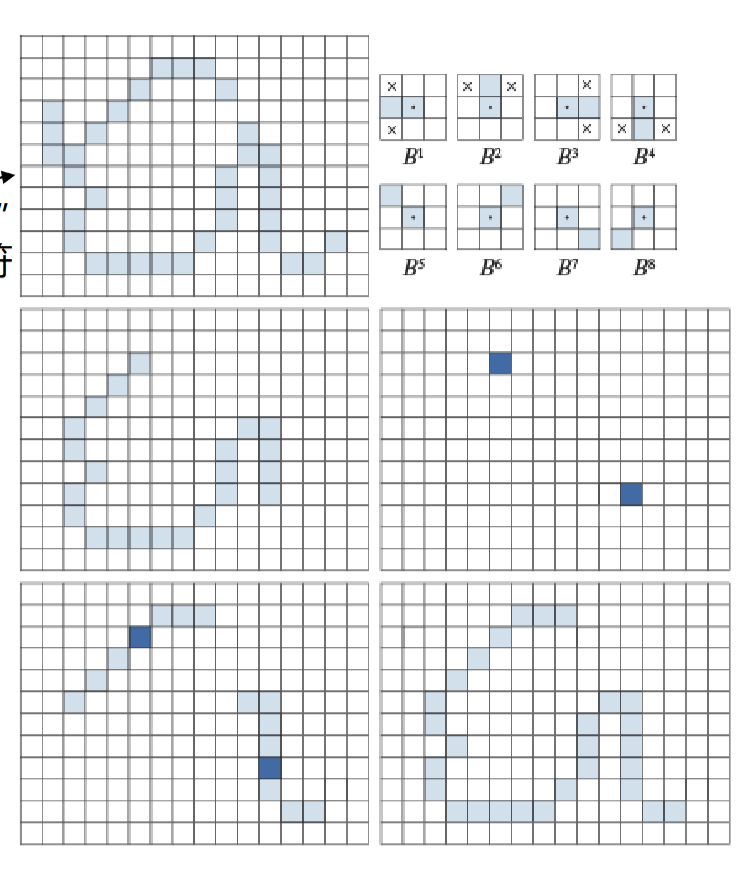
求\(A\)的凸壳\(C(A)\)的算法如下:
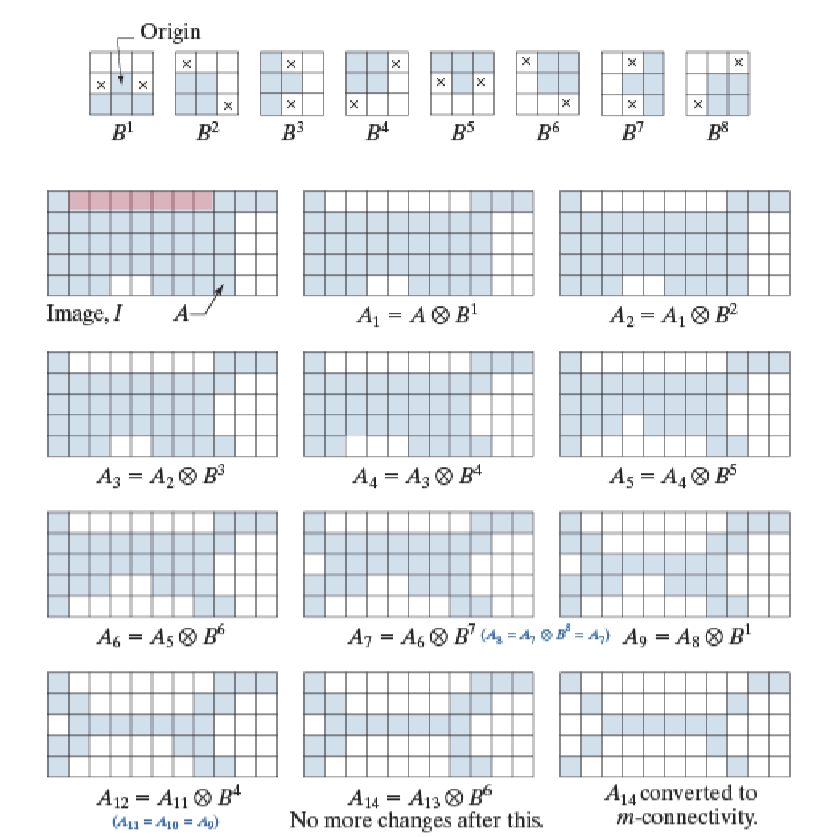
令\(B^i\)如下所示,其中\(\times\)表示don't care term
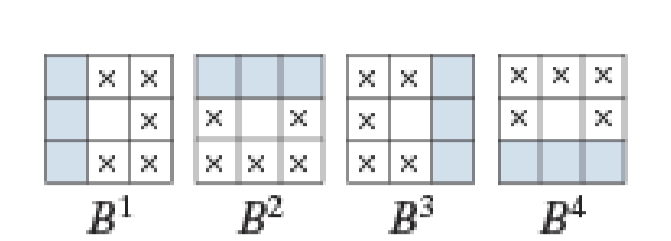
\[ X^i_k = (X^i_{k-1}\circledast B^i)\cup X_{k-1}^i \]
其中\(X^i_0 = A\),当\(X_k^i = X_{k-1}^i\)时结束,记\(D^i = X_k^i\),则凸壳为
\[
C(A) = \bigcup \limits_{i=1}^4 D^i
\]
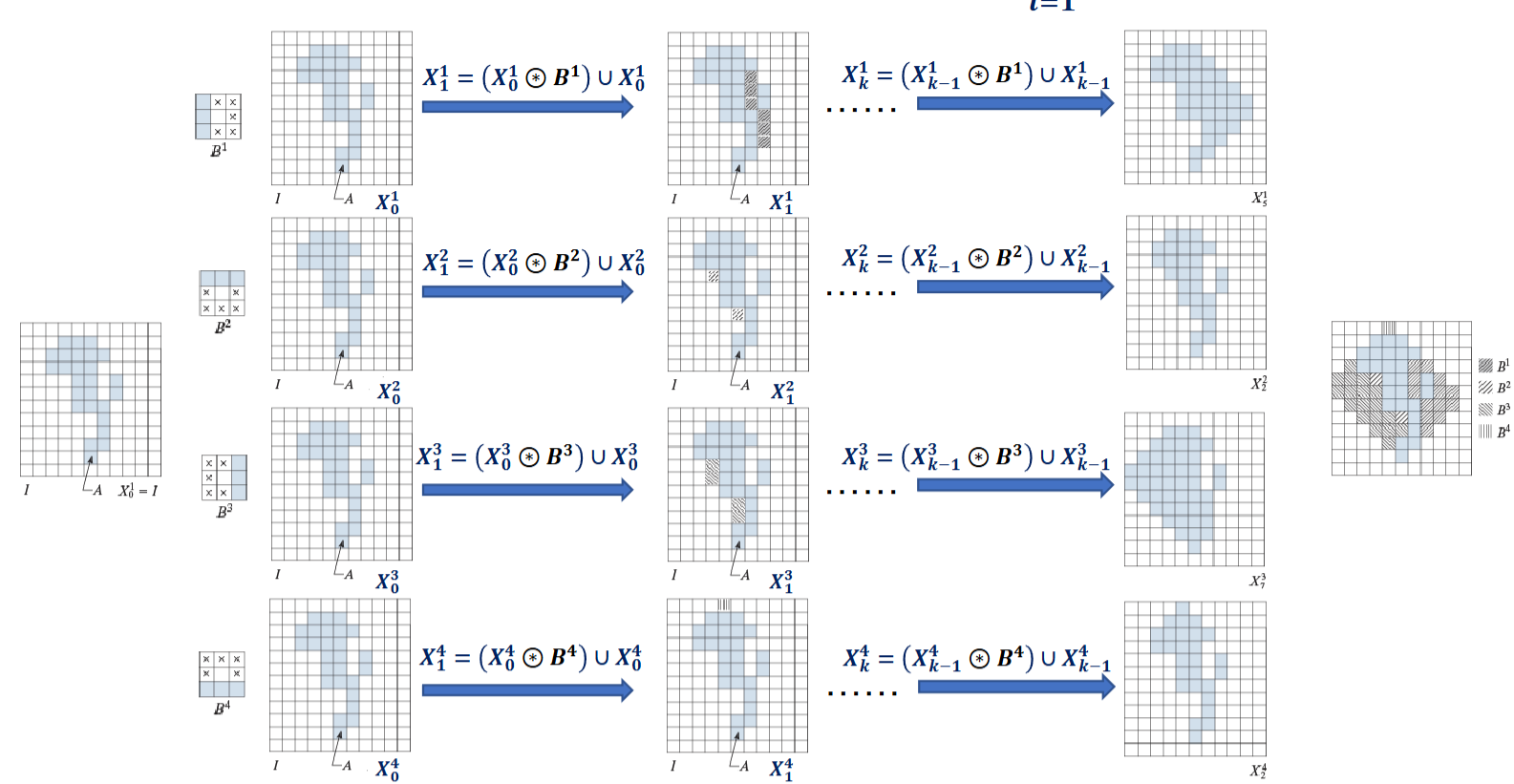
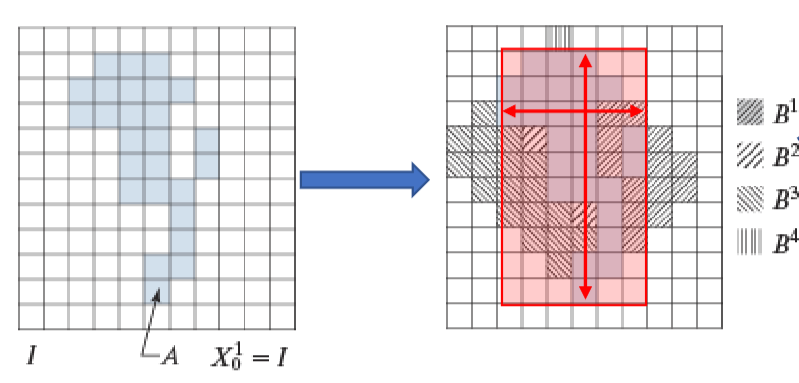
但是还没结束,这样并不是最小的,需要在水平和垂直方向上再限制大小
或者设计更精准的结构元,代价是时间复杂度更高
 |
 |
4.3.13 细化
细化表示为
\[
A \otimes B = A - (A\circledast B) = A\cap (A\circledast B)^c
\]
定义结构元序列\(\{B^i\}\),\(B^{i+1}\)通常是\(B^i\)的旋转,使用这个序列对\(A\)连续细化,直到\(A\)不再发生改变为止
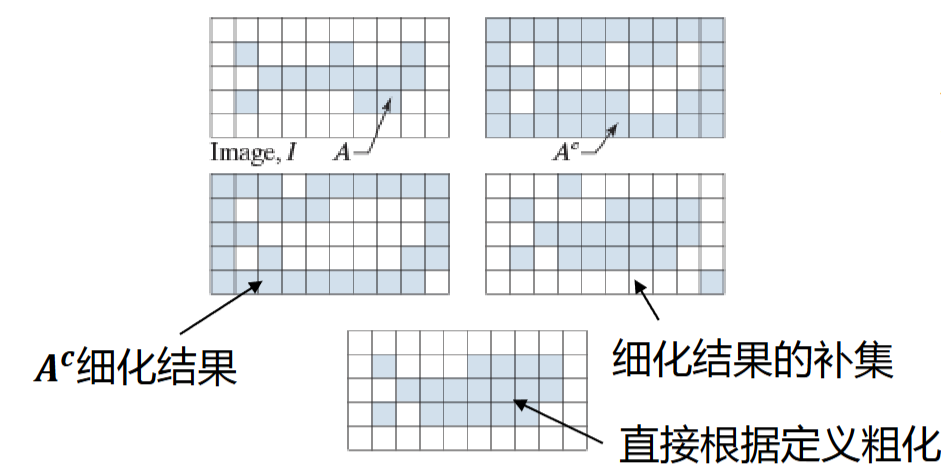
4.3.14 粗化
粗化表示为
\[
A \odot B = A\cup (A\circledast B)
\]
与细化类似,可以用一系列的\(B^i\)操作
实际中通常是先对\(A^c\)细化得到\(C\),再求\(C^c\)得到粗化的结果,不过会产生一些断点
4.3.15 骨架
角平分线
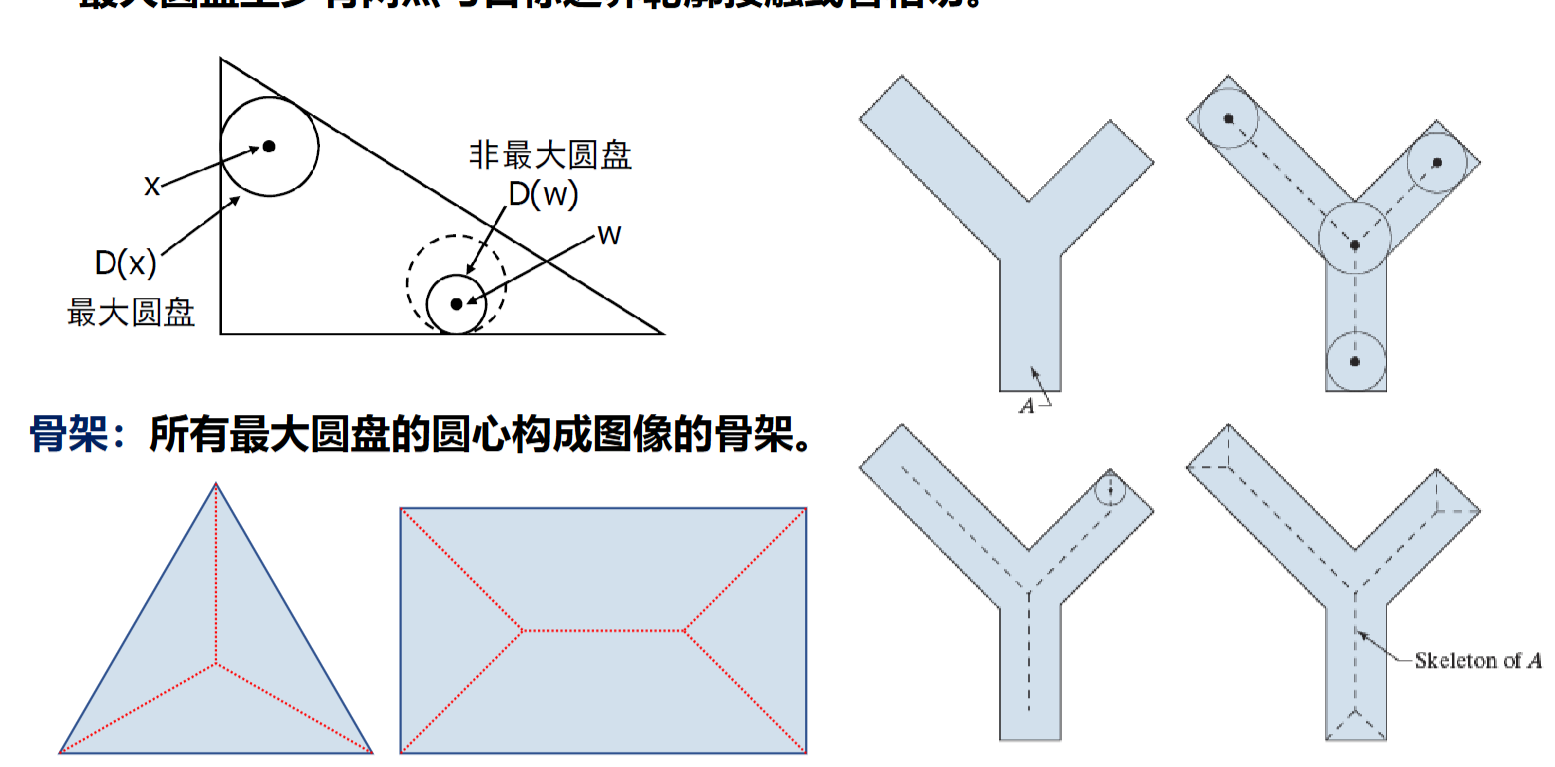
可以通过腐蚀和开运算来实现
\[
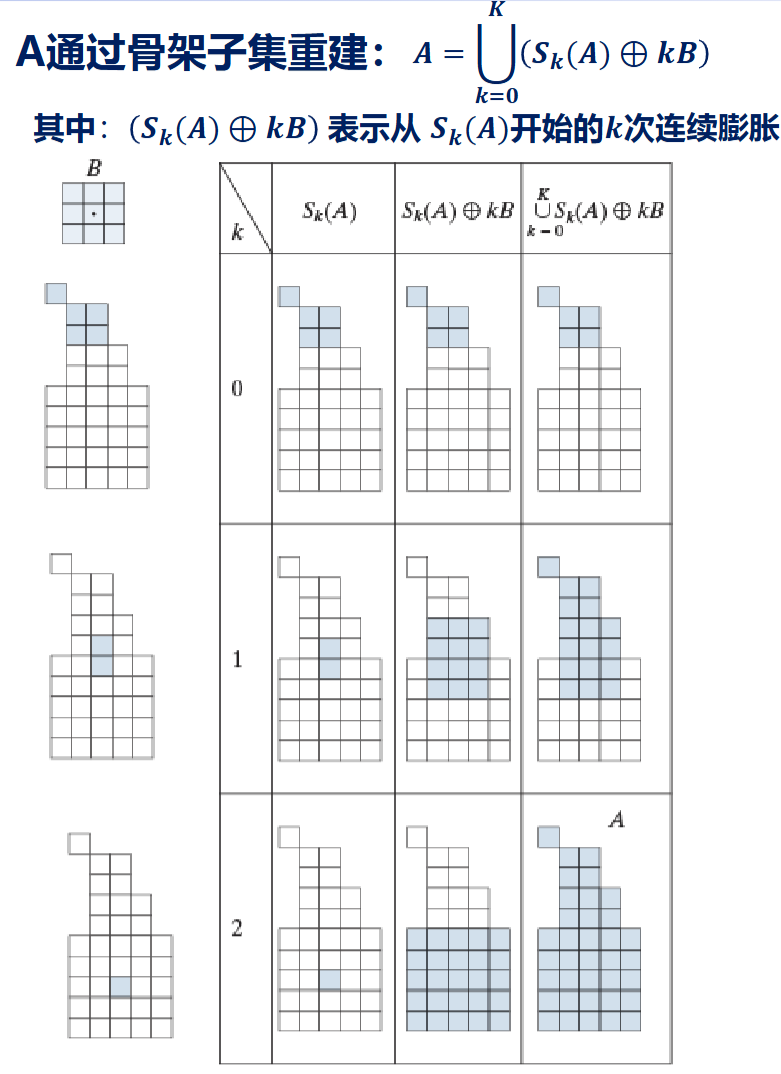
S(A) = \bigcup\limits_{k=0}^N S_k(A)
\]
其中\(S_k(A)=(A\ominus kB)-(A\ominus kB)\circ B\),\(A\ominus kB\)表示连续\(k\)次腐蚀,\(N\)是\(A\)被腐蚀为空集前最后一次迭代
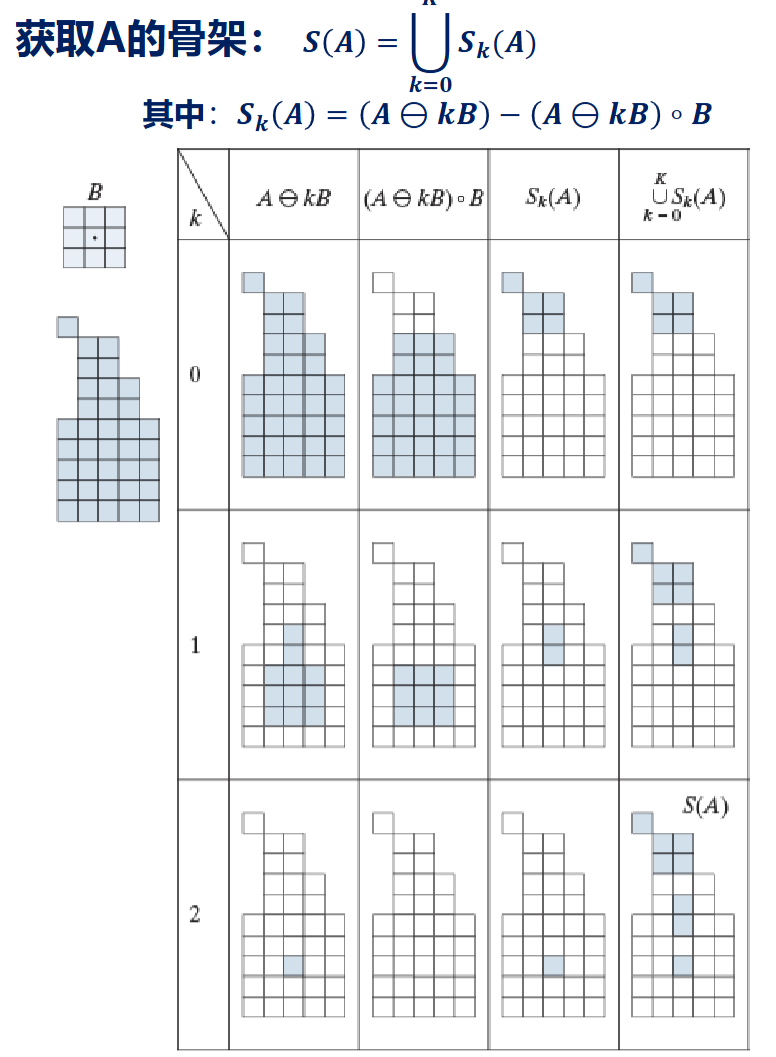
上面\(N=2\)
可以通过\(A\)的骨架的子集来重建\(A\),注意存储的是子集
\[
A = \bigcup\limits_{k=0}^N (S_k(A)\oplus kB)
\]
4.3.16 剪裁
是对细化和骨架化的补充
分为以下几步:
细化
\[
X_1 = A\otimes \{B\}
\]
多次细化消除毛刺
寻找端点
\[
X_2 = \bigcup\limits_{k=1}^N (X_1\circledast B^k)
\]
其中\(N\)是\(B^i\)的个数
膨胀,次数等于细化的次数(也就是删除的毛刺的最大元素个数)
\[
X_3 = (X_2\oplus H)\cap A
\]
其中\(H\)是一个满的正方形
取并集
\[
X_4 = X_1\cup X_3
\]
得到的\(X_4\)就是目标结果
上面有3个删除的毛刺,膨胀了3次
4.4 灰度级形态学
结构元分为平坦/非平坦,前者只有0和1,后者多样
同样地,结构元存在原点,但是不同的是结构元的每一个像素值是灰度值
4.4.1 腐蚀与膨胀
对平坦结构元\(b\),当其原点位于\((x,y)\)时,腐蚀和膨胀分别如下,也就是这个范围内灰度的极值
\[
[f \ominus b](x,y) = \min\limits_{(s,t)\in b}\{f(x+s,y+t)\}\\
[f \oplus b](x,y) = \max\limits_{(s,t)\in b}\{f(x-s,y-t)\}\\
\]
\("-"\)产生自对b的中心对称
对非平坦结构元,定义为
\[
[f \ominus b](x,y) = \min\limits_{(s,t)\in b}\{f(x+s,y+t)-b(s,t)\}\\
[f \oplus b](x,y) = \max\limits_{(s,t)\in b}\{f(x-s,y-t)+\hat{b}(s,t)\}\\
\]
其中\(\hat{b}(x,y) = b(-x,-y)\),一一对应相加减
对偶特性依然在
\[
[f\ominus b]^c = f^c\oplus \hat{b}\\
[f\oplus b]^c = f^c\ominus \hat{b}
\]
其中\(f^c(x,y) = -f(x,y)\)
一般腐蚀后更暗,膨胀后更亮
4.4.2 开闭运算
定义同二值图像
满足
\[
[f\circ b]^c = f^c\cdot \hat{b}\\
[f\cdot b]^c = f^c\circ \hat{b}
\]
几何解释如下
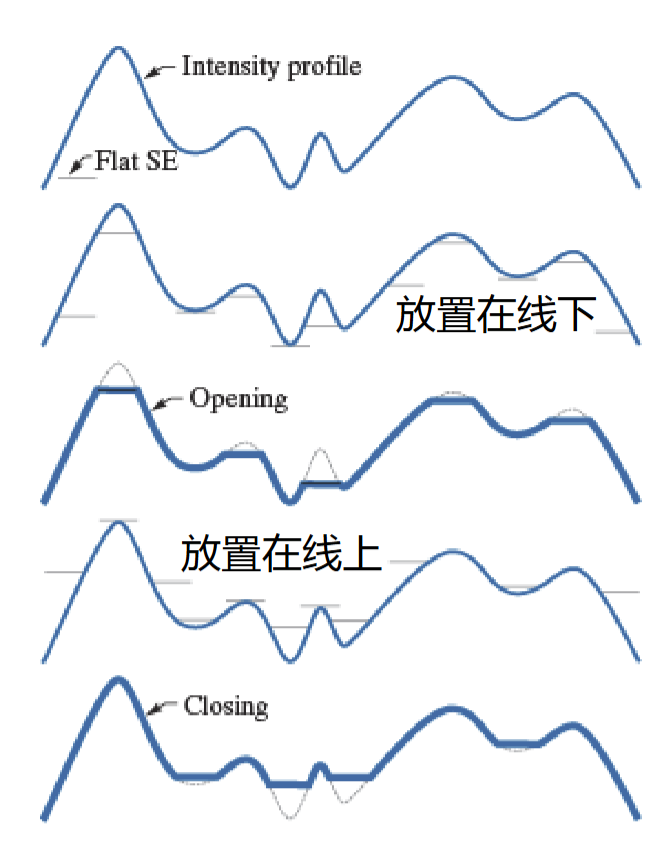
这是一维的灰度刨面图,开运算就是从下方削去峰值,闭运算就是从上方填平谷值
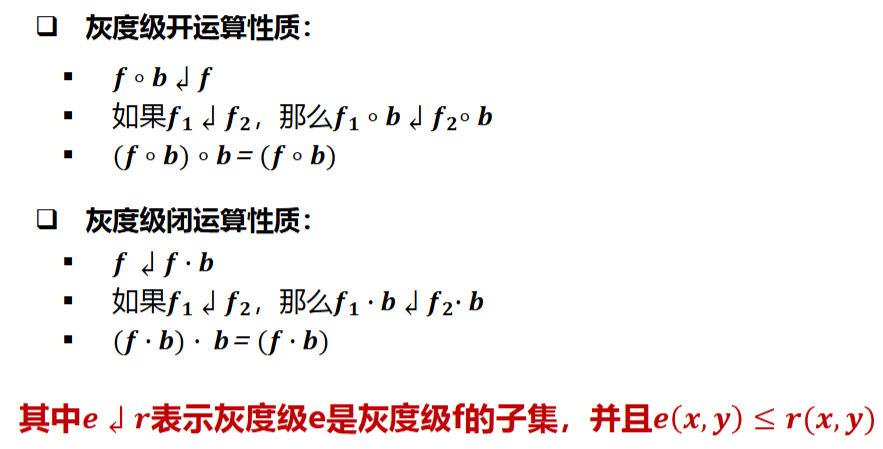
红字的\(f\)改为\(r\)
开运算对图像的暗特征和背景的影响忽略不计,但亮特征变小;闭运算相反;效果取决于结构元大小
开闭运算的组合可以产生形态学滤波器进行平滑和去噪
4.4.3 形态学梯度
定义
\[
g = (f\oplus b)-(f\ominus b)
\]
为灰度图像的形态学梯度,其中\(b = I_{3\times 3}\),原点在中心
4.4.4 顶帽变换和底帽变换
白顶帽变换和黑底帽变换分别是
\[
T_{hat}(f) = f - (f\circ b)\\
B_{hat}(f) = (f \cdot b) -f
\]
白顶帽可以获取大的亮特征,除去暗特征
黑底帽可以获取大的暗特征,除去亮特征
一个重要应用是矫正不均匀光照的影响,进行阈值处理之前先进行对应的帽变换
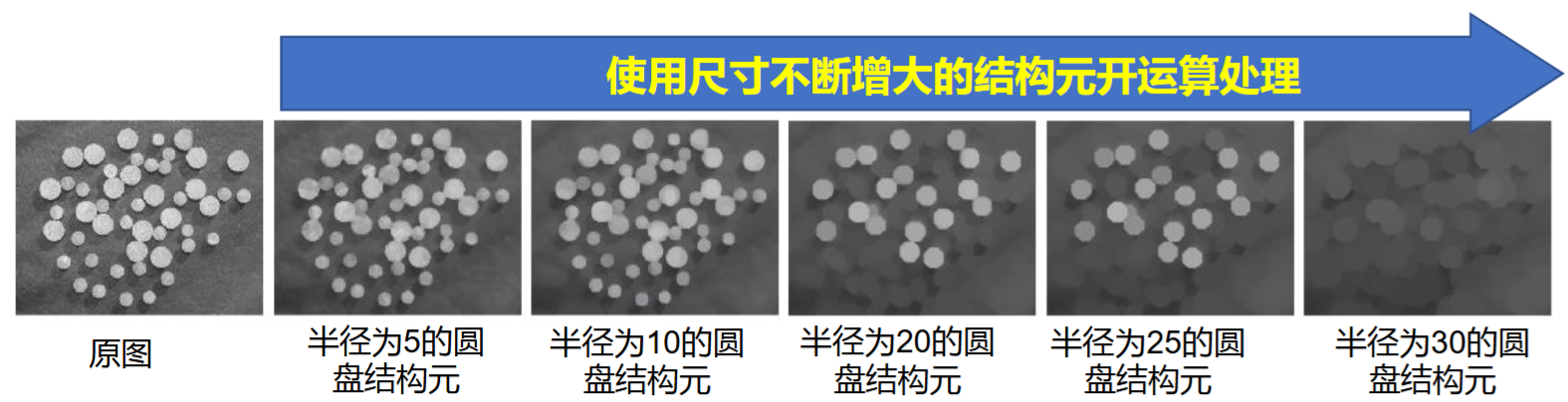
4.4.5 粒度测定
特殊大小的开运算会对包含类似大小颗粒的区域产生最大影响,用不同大小的结构元对图像进行开运算,除去的就是类似大小的结构,可以进行粒度的检测和统计
4.4.6 纹理分割
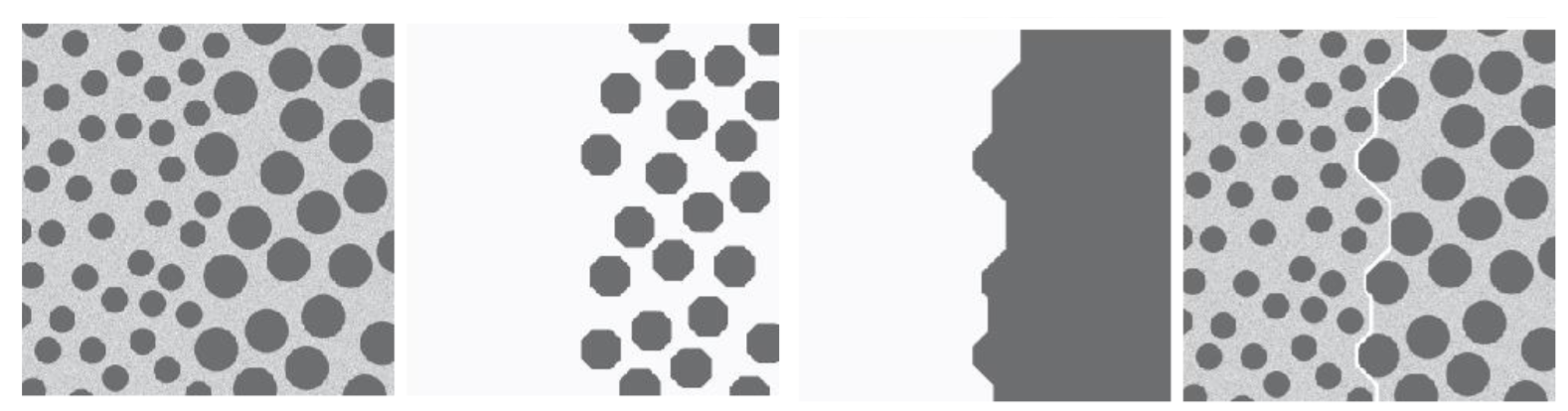
如何一步一步得到右边的图像:
- 选用小结构元进行闭运算,得到第二张图
- 用很大的结构元进行开运算,得到第三张图
- 对第三张图进行形态学梯度变换得到纹理边界,将边界叠加到原图上得到第四张图