2 图像基础
2.1 视觉
不是光强度的简单函数
图像获取的基本过程
光源->对象->摄像单元(传感器)->A/D转换单元->图像储存单元->计算机
2.2 取样和量化
取样:对图像坐标(x,y)数字化,决定矩阵大小(MxN)
量化:对幅值\(f(x,y)\)数字化,决定灰度级数(\(L=2^k\)),灰度越高越亮
存储比特数:\(b=M\times N\times k\)
2.3 空间分辨率和灰度分辨率
对于取样精度\(M\times N\),灰度级数\(L=2^k\),灰度比特k
dpi: dots per inch,1英寸里有几个像素点就是几
空间分辨率=\(\frac{视场(\mathsf{FOV})}{像素点数}\),越小,空间分辨率越高
饱和度:最大的灰度值,超过这个值灰度被裁掉,为恒定的高灰度级
对比度:最高与最低灰度级之间的灰度差L
图像内插
用已知数据估计位置数据,用于放大、收缩、旋转和校正
常用算法:最邻近,双线性,双三次
matlab函数: imresize(), imrotate(), imtransform(), interp1(), interp2()
2.4 像素基本关系
相邻像素
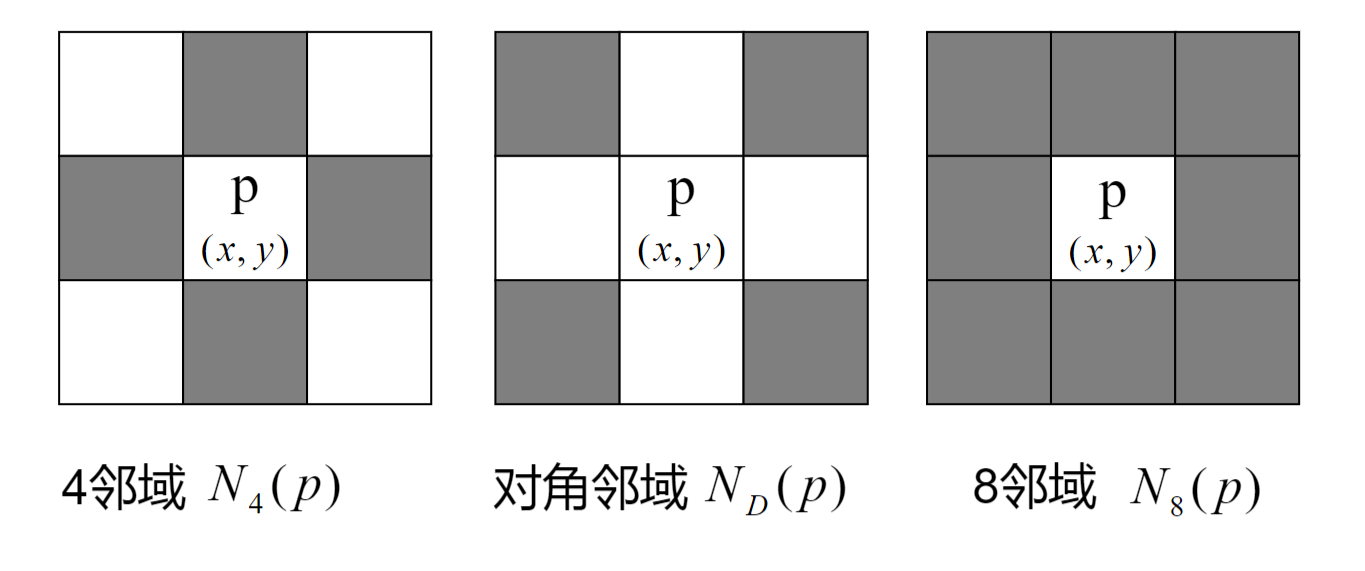
图中阴影为相应的邻域
邻接性
要素:像素灰度值邻接(灰度都在一个值域V内);像素位置相邻
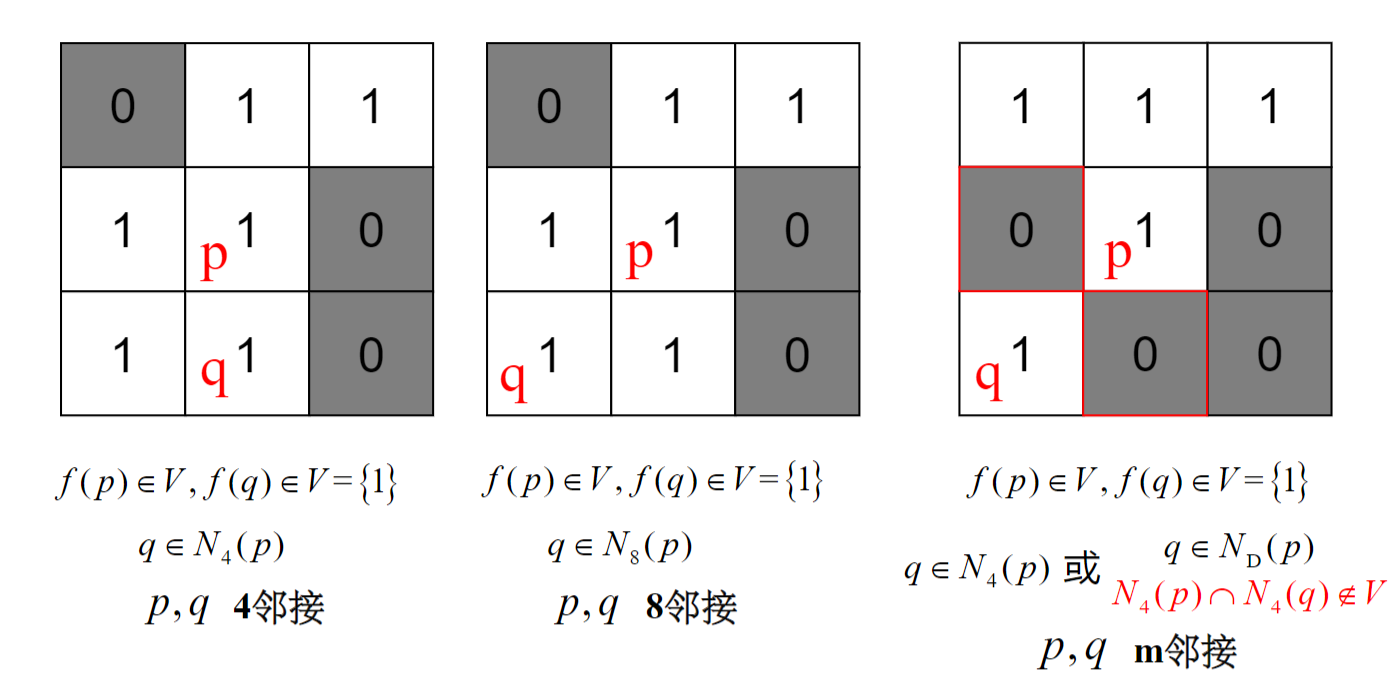
其中4邻接和m邻接都是8邻接,但8邻接不一定
连通性
用邻接定义的连通,x邻接就是x通路(x=4,8,m)
如果通路闭合,为闭合通路;一个通路中的任意像素连通;
连通分量见离散,只有一个连通分量,称连通集
区域和边界
图像的一个连通子集称为区域;如果两个区域可以连通,称为邻接区域
图像中k个不邻接的区域,且不触及图像边界,称k个区域的并集为前景,其余为背景
区域的边界:区域与图像其他部分相邻的像素集合
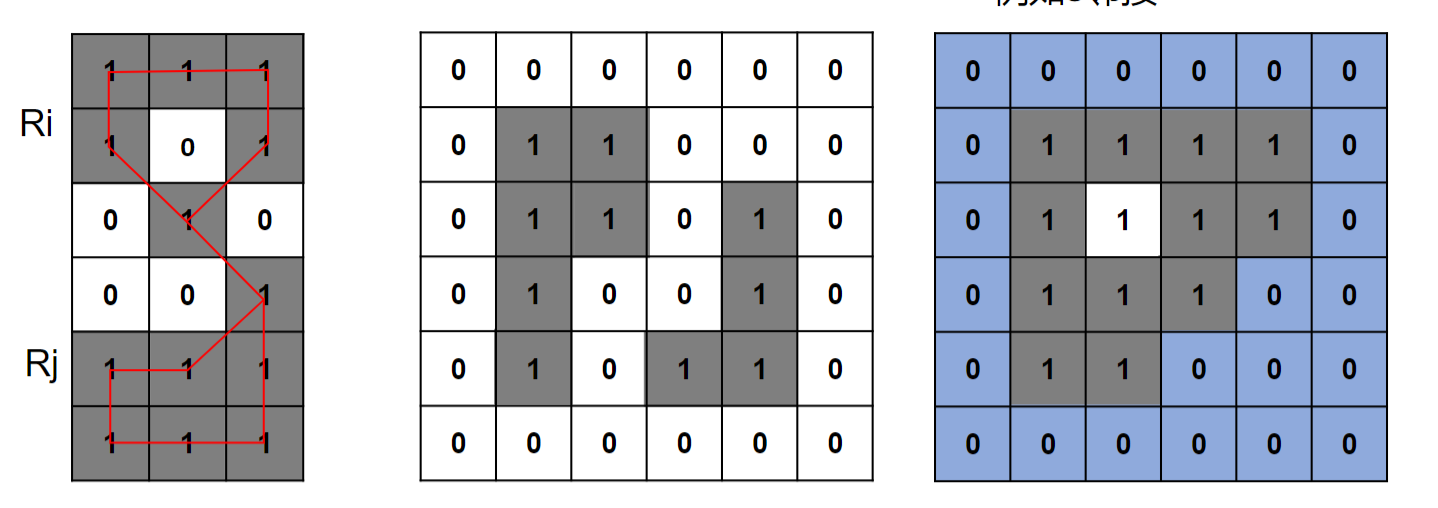
分别是邻接区域,前景,边界
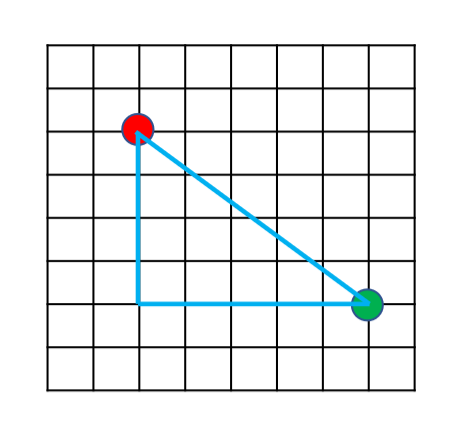
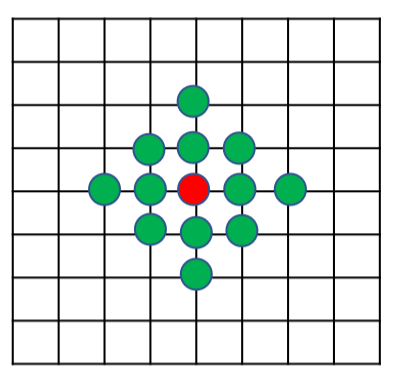
像素之间的距离
欧氏距离:\(D_e(p,q)=\sqrt{(x-s)^2+(y-t)^2}\)
城市街区距离:\(D_4(p,q)=|x-s|+|y-t|\)
棋盘距离:\(D_8(p,q)=\max\{|x-s|,|y-t|\}\)
 |
 |
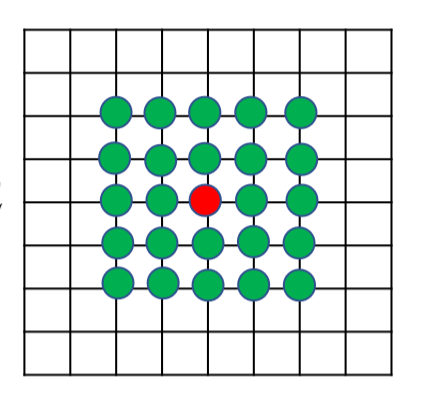 |
分别是欧氏,曼距,棋盘
2.5 图像的列阵操作
列阵操作就是逐个像素操作
图像相加,相减,乘除(不是矩阵乘除,是元素)