Multiocular image sensor with on-chip beamsplitter
Optical Express http://dx.doi.org/10.1364/OE.24.018035
报道了一种单主镜头多目图像传感器芯片
装置的大小是0.8cm;2.1M pixel
1 Introduction
双镜头,双传感器系统需要对镜头的位置进行严格调整,且长时间观看立体图像会带来不适感,为此需要单主镜头和单传感器且可调节基线距离的立体相机
两种单主镜头相机
- 获取左眼右眼信息,利用配准进行重建,极度依赖配准算法
- 使用额外的光学组件区分左右眼图像,根据视角不同来确定,但是体积太大
另一种方法:利用光场相机和MLA,生成全息图像,但是需要持续对准MLA或固定死
本文方法
具有角度敏感的传感器,区分入射光线到像素的入射角,使用了光栅进行区分
即获得了不同角度看到的多幅图像,从中选择两幅进行配准
2 单主透镜立体成像系统原理
成像系统能从主镜头入射的水平角度区分入射光线,不需要第一步的图像水平配准,基线距离根据入射角度而定
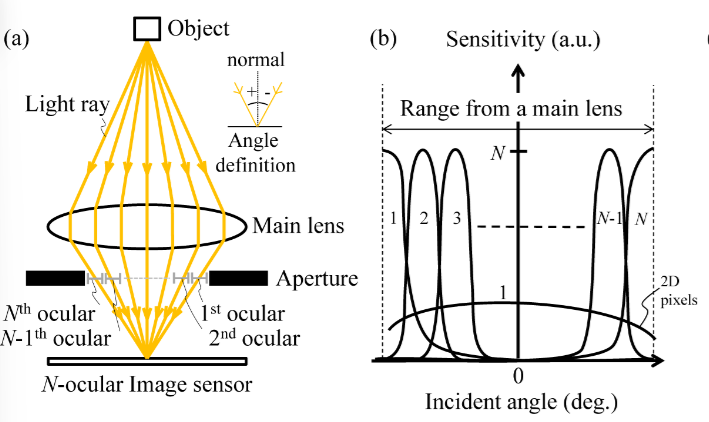
用MLA分为了多目,但只有一个主要的透镜,每个目的传感角度如右图
每个目的灵敏角度是传统相机的1/N,在最灵敏的角度下,每个目比传统相机高N倍
3 片上光学成像系统
3.1 滤光片和MLA的联合设计
滤光片和内部的小透镜是联合设计的,根据外部的非主透镜来
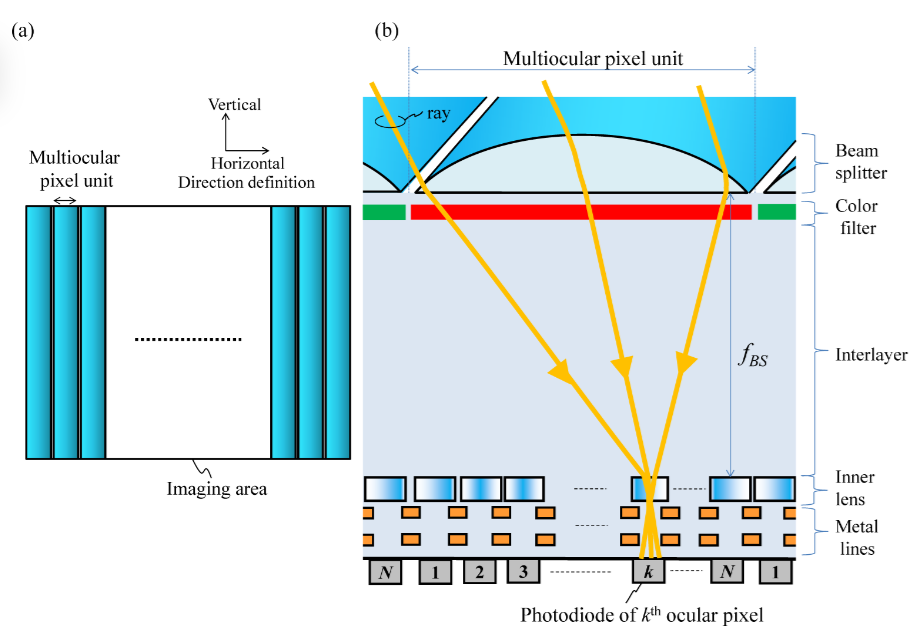
对应于main lens到Aperture的那一段,左边是俯视图,是LA,右边是截面图,每个滤光片排列的方式如下
是交错的
外部透镜的焦距要使得聚焦的光线能够到达第1,N个内部透镜,经过内部透镜将光线聚焦到每一个光电二极管(也就是第k目),金属线的作用是限制入射光的角度,相当于场光阑
3.2 内部微透镜
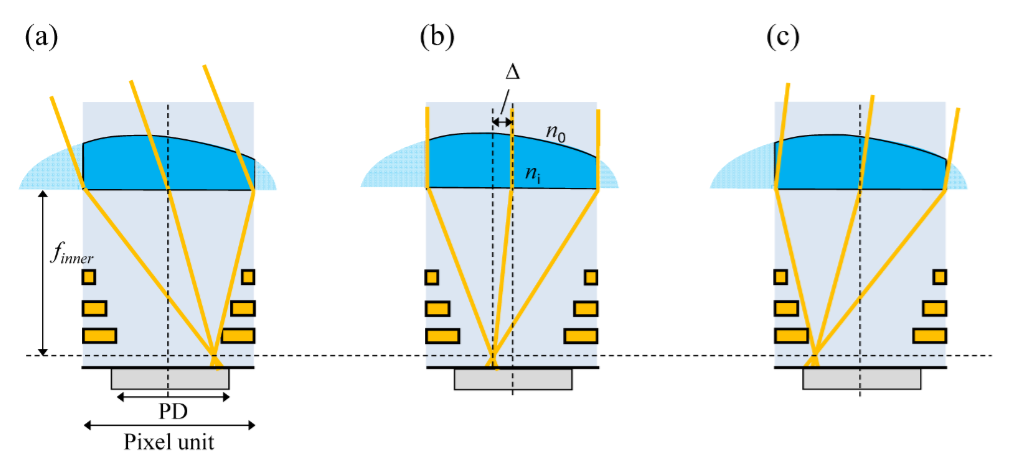
上图表示了内部微透镜在金属线的限制下的聚光情况,其中\(\Delta\)表示光线聚焦处距离中央的距离,根据近似公式
\[
\Delta = -f_{\mathsf{inner}}\frac{n_o}{n_i}\sin\theta
\]
求出,其中\(\theta\)表示最上方光线的主要角度,偏左是负,根据这个\(\Delta\)区分角度和视角
4 多目信号处理
基线距离可以自由选择,通过选择不同目的图像分别作为两目的图像
通过光强叠加实现,但是系数通过指定入射角度和目的位置计算
\[
I_p(x,y) = \sum a_k I_k(x,y)
\]
其中\(I_p\)是指定的入射角度,\(a_k\)可以通过灵敏度计算,例如
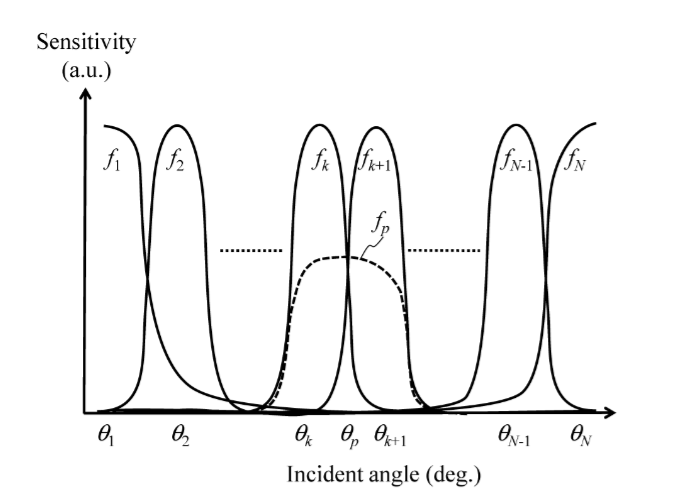
通过这张图,\(a_i=\begin{cases}0\,\,,\,i\neq k,k+1\\0.5\,\,,\,\, i=k,k+1\end{cases}\)
相当于把几个角度的图像加权得到新的角度的图像,也就是改变了基线距离,实现基线距离可以软件控制的操作