Cross-Based Local Stereo Matching for Orthogonal Integral Images
作者:
MingXiao
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 19, NO. 7, JULY 2009
1 Introduction
将立体配准手段大致分为了两类
- 在预先定义的多个窗口中选择最合适的,缺点是窗口的形状受到了限制
- 在一个窗口内修改像素的权重,很显然开销很大
本方法的关键思想,见上文提及
2 具体算法
假设:在一个区域内,匹配的元素应该有相似的灰度和视差
为了找到点\(p(x_0,y_0)\)所在的区域,以\(p\)为中心,构造cross,将水平段记为集合\(H(p)\),竖直段记为集合\(V(p)\),并定义一个集合\(\{h_p^-, h_p^+, v_p^-,v_p^+\}\)作为这个cross的边界限制
这个边界集合的定义是关键,回顾图像分割的内容
最终得到的结果和一个3*3的cross取最大值,保证一定存在一个区域而非单个元素
在\(V(p)\)上做滑动,每一个\(V_i(p)\)都能根据一个规则生长出一个\(H_i(p)\),将所有的\(H_i(p)\)作为这个区域的元素
\[
U(p) = \bigcup\limits_{q\in V(p)} H(q)
\]
交换\(H,V\)的地位,也能得到很相近的结果
后面整合cost的部分见上文
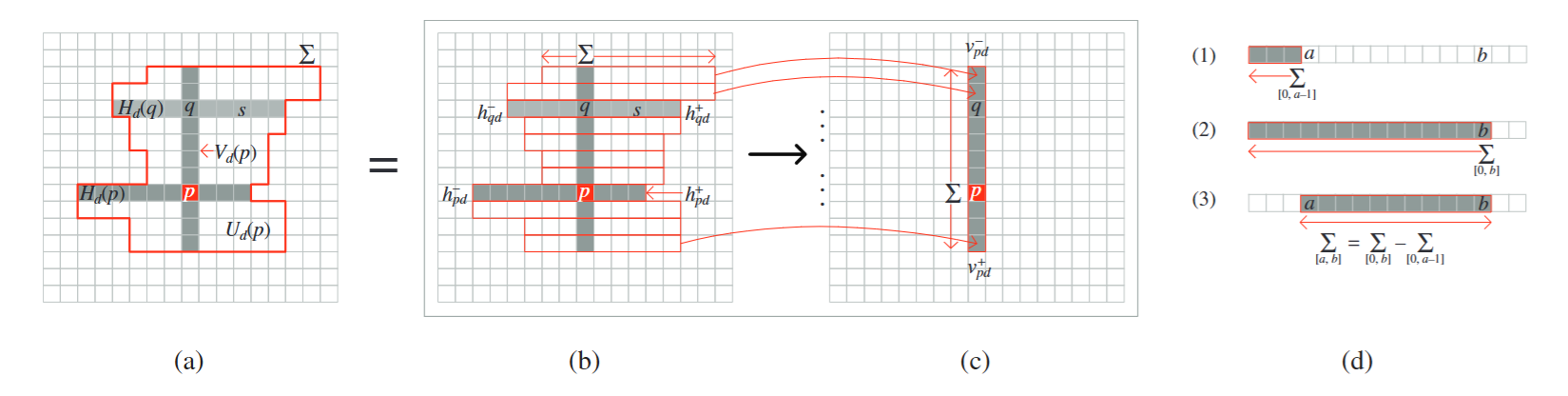
3 快速整合算法
还是这个问题,整合的数据量太大了,想办法减少数据量
这里选择的方法是数据复用
原先的区域加和,可以分解为先水平加和,再竖直加和
首先计算全局的可能的水平条的加和,再计算对于区域时调用即可
算法的关键在于d图的复用